Other Projects
Water depth mapping
This project uses an NMEA capable echolot sounder, GPS, SD storage and an Arduino for depth mapping of water bodies. I started this project because I ran aground in the harbour entrance partly because the depth maps were incorrect. After I built this map, they dig out the flat spots. GitHub.
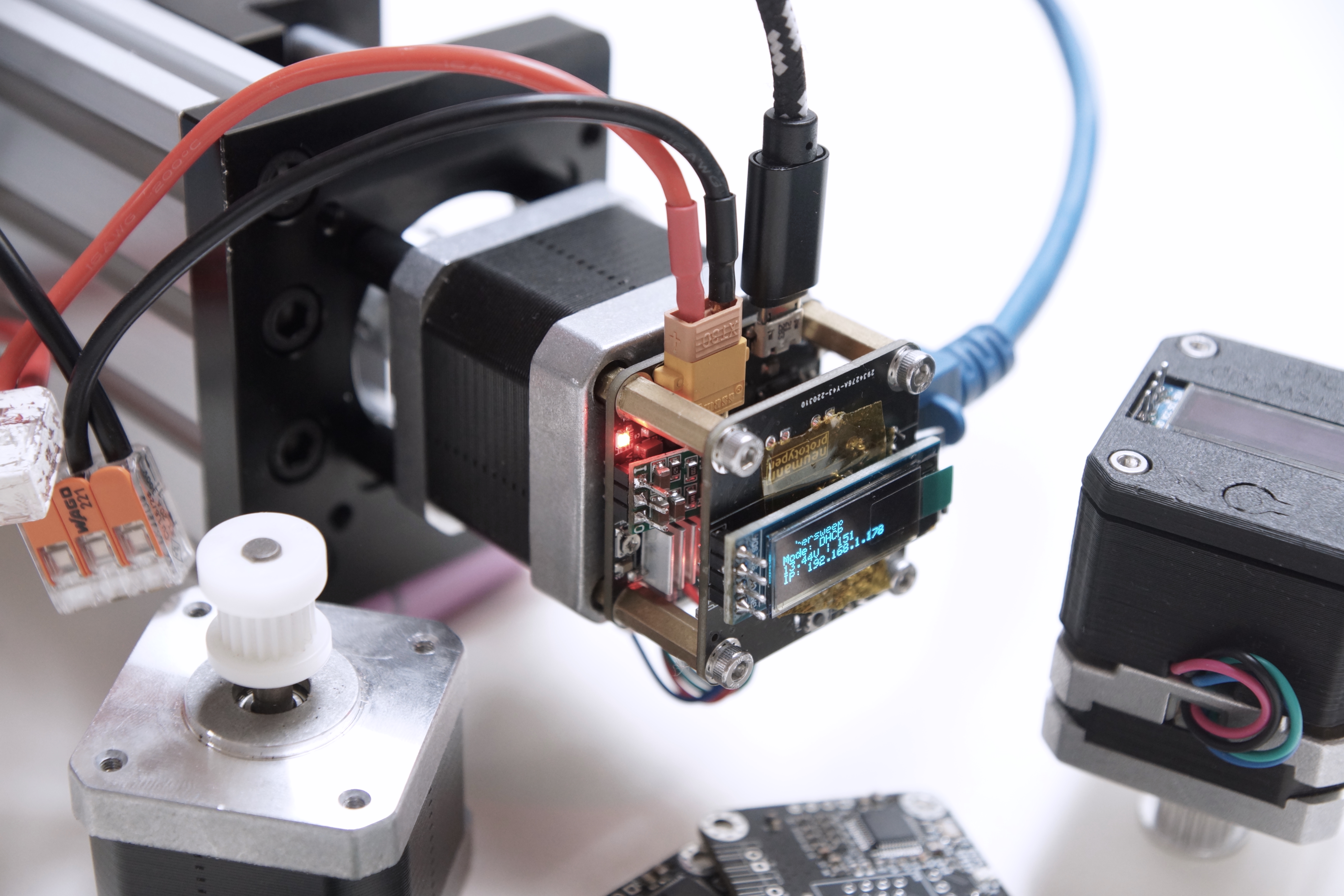
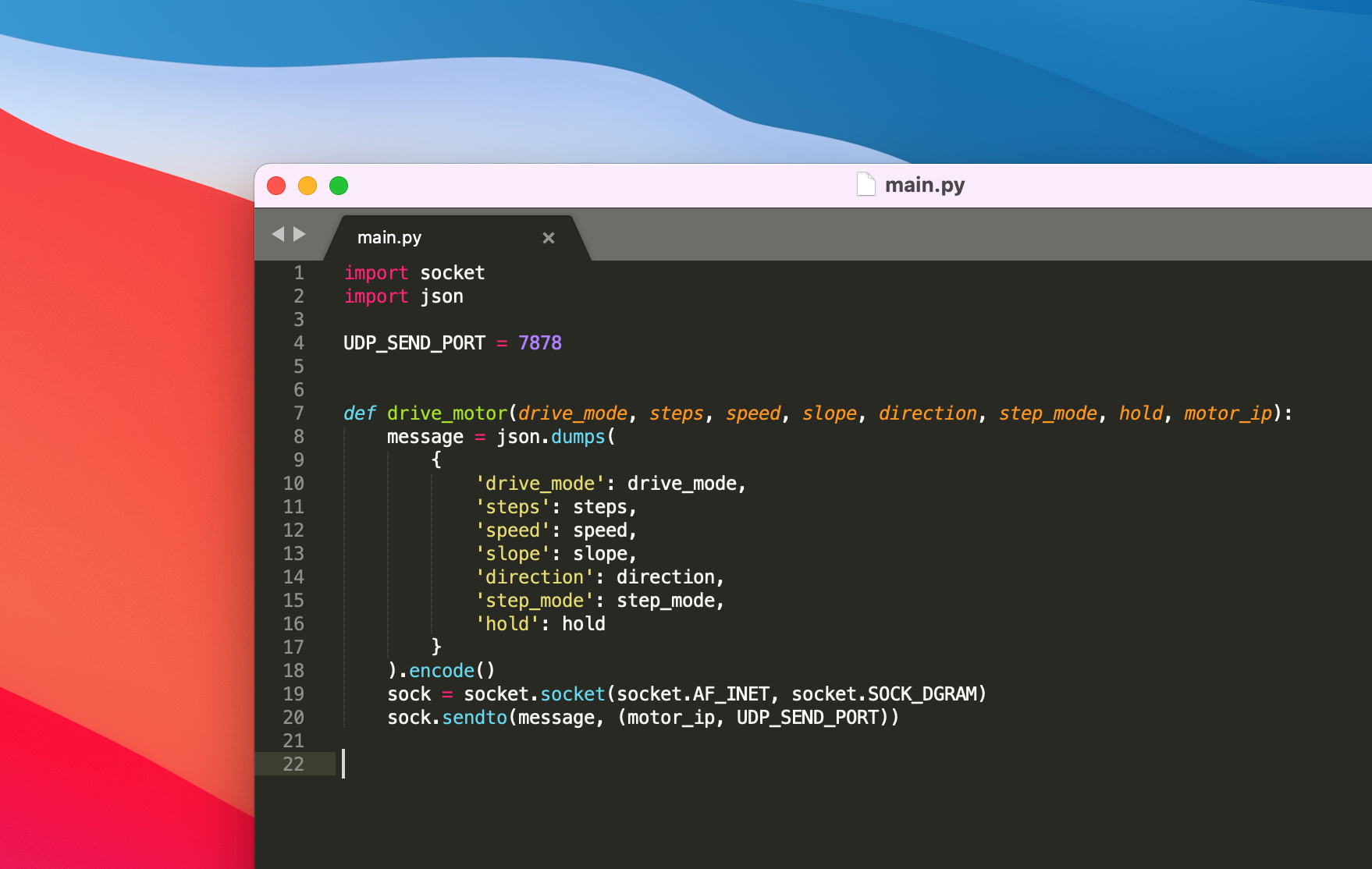
3D Wifi Mapping
Project to measure and visualize the 3D shape of a WiFi signal. Using two Ethersweep controllers and an esp32 for RSSI measurements. Control and visualization done in Python and Matplotlib. GitHub.
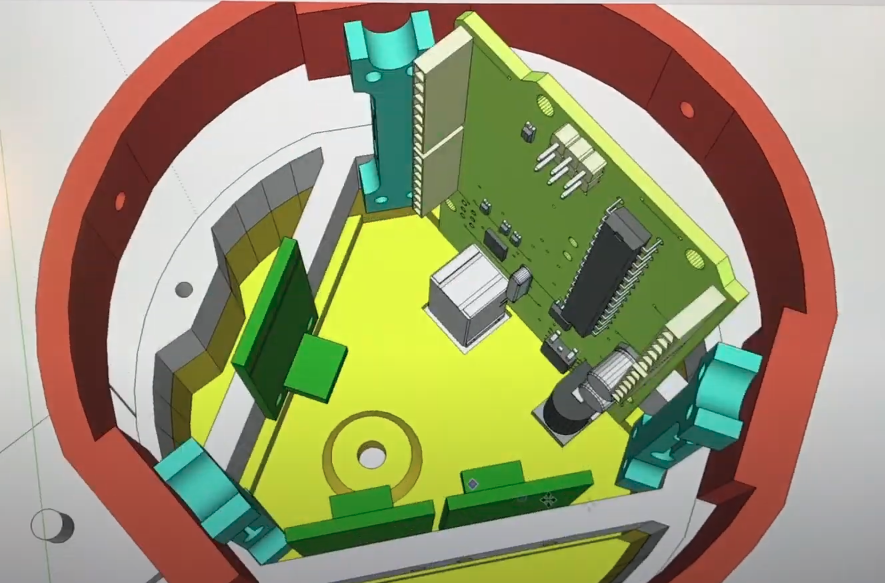
Solid state anemometer
Using load cells I built an anemometer that has no moving parts. This is beneficial, because no debris couldn't influence the measured results. Also it is less prone to failure. Link.
Media appearances
Are you interested in a collaboration?
Please reach out to me for any questions or collaboration opportunities.
Thank you.
Contact
